|
|
请使用QQ关联注册PLM之家,学习更多关于内容,更多精彩原创视频供你学习!
您需要 登录 才可以下载或查看,没有账号?注册
x
Session *theSession = Session::GetSession();% _% Z( {1 b' ^2 b/ a. ?* Z. v
Part *workPart(theSession-> arts()->Work());# B% H! {! V# s, h arts()->Work());# B% H! {! V# s, h
Part *displayPart(theSession->arts()->Display());! p+ H6 A; @1 l( @, y
7 J6 H7 ^( S- }5 `: o! J
Features::MoveObject *nullFeatures_MoveObject(NULL);
+ M( d0 J4 [ x1 n Features::MoveObjectBuilder *moveObjectBuilder1;/ R/ W7 n# O) l* P/ J" d( a3 n0 B
moveObjectBuilder1 = workPart->BaseFeatures()->CreateMoveObjectBuilder(nullFeatures_MoveObject);2 R5 E: ]" _! }! |+ R. H( c: ?) H
: C, `5 r' S4 o NXString angleValueString;
$ Y( Q$ \$ `: H6 U# u7 a9 I3 Q( q6 x std::stringstream ssang; V3 V9 q" X D# D) d
std::vector<NXOpen::Body*>bodies;
, x) g$ `5 S* j$ g NXOpen::Body *bodyList;% D3 K2 T4 r( l5 { u/ j
std::vector<NXOpen::Curve*>curves;2 i/ B) a- l3 g, y
NXOpen::Curve *curveList;# L6 @8 q: }% n6 S4 k: q1 i
std::vector<NXOpen: oint*>points;+ f& w0 u$ N; ]( W9 Q! N oint*>points;+ f& w0 u$ N; ]( W9 Q! N
NXOpen:oint *pointList;% t4 `+ t o, b' X! U m
* n2 {( t4 Q/ ^. B; u4 n5 d
//Get base point
' _: K( a X% p BlockStyler:ropertyList *pointProperty = point0->GetProperties();
1 M, v2 T& {; b! }; ?0 x Point3d point= pointProperty->GetPoint("oint");" s8 P1 } J# K# [( `4 R
delete pointProperty;
9 U3 k/ M' K9 F3 _: E pointProperty = NULL; A6 K# U0 J7 \; @1 {
# w0 O- B$ }( C, L- K //Get revolve Lie value# H: X/ a/ @% V$ R# b! d
BlockStyler:ropertyList *rValue = expression0->GetProperties();/ v+ ^9 F$ b5 o' i/ o: I+ A
double rangle = rValue->GetDouble("Value");
- M; B3 F$ s# @ j. `" X delete rValue;/ U4 {1 D, ^2 k2 Y- V1 u% K' |9 ?
rValue = NULL;; b" f8 [" s8 l4 ~1 J: ^0 {- S
- _* _ p3 m% l% u# {: J. M //Get Rod section Objects
1 \3 F4 a% A$ H BlockStyler:ropertyList *bodyObjects = selection0->GetProperties();
$ L. `2 S% F) t ]: n vector <NXOpen::TaggedObject*>taggedObjects = bodyObjects->GetTaggedObjectVector("SelectedObjects");/ h) F9 z' h8 v. f* ~6 R
delete bodyObjects;6 D" H. J3 u$ l! a5 X3 ^3 z
bodyObjects = NULL;/ H" P4 b) H$ m* K
. Q; ?; K5 p4 |1 E6 G //convert TaggedObject to body & curve & point1 `1 \% H9 f4 i
bodyList = dynamic_cast<NXOpen::Body*>(taggedObjects[0]);
$ m2 |( J! o0 ~; [$ t; A* v curveList = dynamic_cast<NXOpen::Curve*>(taggedObjects[0]);
) E/ z& I; Y- X7 J J: s pointList = dynamic_cast<NXOpen:oint*>(taggedObjects[0]);
$ m5 f8 u. B$ G4 W, Z
/ V- ^" b2 P7 L2 [
) d/ Z! y! d9 f5 S% n% n! Q6 V //convert values to string
# V* f! a* c, M, l ssang<<rangle;! F0 z0 Y0 b9 f
angleValueString = ssang.str();" z3 C! N4 b8 K; O
1 }* g) a" N6 a/ e
; Y1 J, c* N ?1 X //create motion feature
" m, u1 k4 y- V: t$ Z1 Q6 S" A. Y) v" @* G
0 t$ D' J. H, L" t: n Point3d origin1(0.0, 0.0, 0.0);0 b: u9 f& ~2 F7 W* M% r6 J& F* Y
Vector3d vector1(-0.0, -1.0, -0.0);% j, X4 f- S! U/ r
Direction *direction1;
& ^$ k4 _$ a! s: E direction1 = workPart->Directions()->CreateDirection(origin1, vector1, SmartObject::UpdateOptionWithinModeling);
" p: O, I& ^' ^' ? G8 j0 ]
$ c! ^+ h6 U8 d2 @ Point *nullPoint(NULL);0 H; @& x: D+ v7 Y, G
Axis *axis1;3 t, H3 ^1 Q, W2 h- _$ F
axis1 = workPart->Axes()->CreateAxis(nullPoint, direction1, SmartObject::UpdateOptionWithinModeling);
% l3 Y" C" Q2 n; g( w+ k9 ^
( t4 [, @+ L& k2 N9 F! x" `7 ~ Point *point1;; ^8 p* L5 n+ f& v G) Z7 w
point1 = workPart->oints()->CreatePoint(point);
6 }5 n. k5 P3 C. }, \
9 O2 k6 R% y# \$ f, @" W axis1->SetPoint(point1);
2 g+ c2 u% J: N moveObjectBuilder1->TransformMotion()->SetAngularAxis(axis1);
- j4 n. C$ M! X: S moveObjectBuilder1->ObjectToMoveObject()->Add(bodyList);
3 M) o% N9 L4 K9 L! Y( V6 p moveObjectBuilder1->ObjectToMoveObject()->Add(curveList);
( E$ P5 H/ I: v( E5 G% W5 Z& s/ V moveObjectBuilder1->ObjectToMoveObject()->Add(pointList);7 t4 t7 O- [: g) Y
moveObjectBuilder1->TransformMotion()->Angle()->SetRightHandSide(angleValueString);1 D/ T4 x% g2 k2 M2 i7 w
moveObjectBuilder1->Destroy();
- I5 b7 y5 D @ @. Z: W8 h. t- P* y$ V' Q2 A3 Z9 ^3 T& y
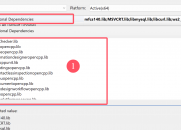
调试没有问题,执行的时候,总是后报错,还请指点一下:
* y! i3 j& K; ~" O( {" d% D* k! O
1 E4 [6 K* |9 E$ A; L8 y
7 _, N5 C1 a) g O8 E5 F6 `" S$ Y
7 W* K- h- M0 F3 \) L$ r( p
|
-

|






 [复制链接]
[复制链接]




 |小黑屋|PLM之家-专注工业软件生态建设,大模型CAD创新生态
|小黑屋|PLM之家-专注工业软件生态建设,大模型CAD创新生态




 发表于 2014-6-27 14:52:48
发表于 2014-6-27 14:52:48



 发表于 2014-6-30 09:59:52
发表于 2014-6-30 09:59:52


